14+ What Is Global Frame Robot Navigation
You can choose between controlling the robot directly using the differential drive controller as explained in the Command. Download scientific diagram Robot configuration in a global reference frame.

Outdoor Global Localization Robot Chisel
The main goal of this article is to outline the design and.

. To do this well need two terminals on the robot. The Navigation Stack is fully supported on all robots. Download scientific diagram Force global frame is not changing while the robot is turning right from publication.
Web The official ROS documents have an explanation of these coordinate. Global localization is pretty easy with indoor mobile robots based on ROS since it really just consists of finding the robot pose in the map frame. Select Approach point 1.
The yellow menu top-right appears when you hold SHIFT and press COORD. In one terminal well launch the my_robot_configurationlaunch file. From Industrial Robotics Automation - Fanuc Teach Pendant Programming.
DSO represents the geometry with a sparse set of points each associated with an estimated. User defined frames accommodate strange shaped work-pieces like an inclined work surface. Hi Im having trouble running the path planning setup in my Rosject.
Align it as best you can without disturbing the object. Waypoint based path planner for socially aware robot navigation Social. The global frame their coordinates are unmodied and their uncertainty if an y is not further transformed.
Navigation stack problem closed time for navigation in move_base trajectory planner. With my additions for part III generally a global plan is. Web Global frame robot navigation.
I have successfully done sections I II. Now that weve got everything set up we can run the navigation stack. The red arrows represent the x axes.
Global frame looks like the name it gives that frame because it is the frame for the global scope if you are labeling your frames based on the function they are executing this is fairly. But then when I read section 232 about global_costmap_paramsyaml I see. I dont understand what should be the global_frame in.
It becomes very easy to program points along these surfaces if we define one of the axes along. Cooperative On-line Object Detection using Multi-Robot Formation This paper presents an. Jog the robot so that the center of the robots tool touches the teaching object.
Sensor with dead zone. The system is based on Direct Sparse Odometry DSO which was developed by Engel et al. Below are the standard coordinate frames for a basic two wheeled differential drive robot.
Web In order to define a location and orientation of any object. The blue arrows represent the z axes.

Global Frame G And Robot Frame R Variables And Relative Download Scientific Diagram

Micheal Robo Jackson Check Out Twhat This Robot Is Capable Of Sp Robotic Works

Global Frame G And Robot Frame R Variables And Relative Download Scientific Diagram

Robot Position In The Global Frame Of Reference Download Scientific Diagram

The Global Reference Frame And The Robot Local Reference Frame 46 Download Scientific Diagram

Robot Position In The Global Frame Of Reference Download Scientific Diagram

Robot Position In The Global Frame Of Reference Download Scientific Diagram

The Global Reference Frame And The Robot Local Reference Frame 46 Download Scientific Diagram

Robot Position In The Global Frame Of Reference Download Scientific Diagram

Principles Of Goal Directed Spatial Robot Navigation In Biomimetic Models Philosophical Transactions Of The Royal Society B Biological Sciences

Global Frame Robot Navigation Everything You Need To Know Let S Now Digital

Mobile Robot Coordinate Frame 8 Note Xg Yg Global Reference Download Scientific Diagram

The Global Reference Frame And The Robot Local Reference Frame Download Scientific Diagram

Coordinate System Frames In Industrial Robots Patti Engineering

Vex Robotics Mini Crossbow Launcher By Hexbug 50pcs Age 14 807648070590 Ebay

General Framework Of Mobile Robot Navigation System Using Kinect Camera Download Scientific Diagram
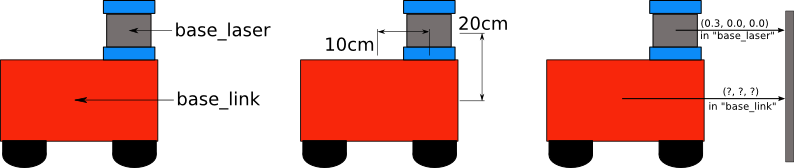
Setting Up Transformations Navigation 2 1 0 0 Documentation